






Autonomy & Mobility Lab

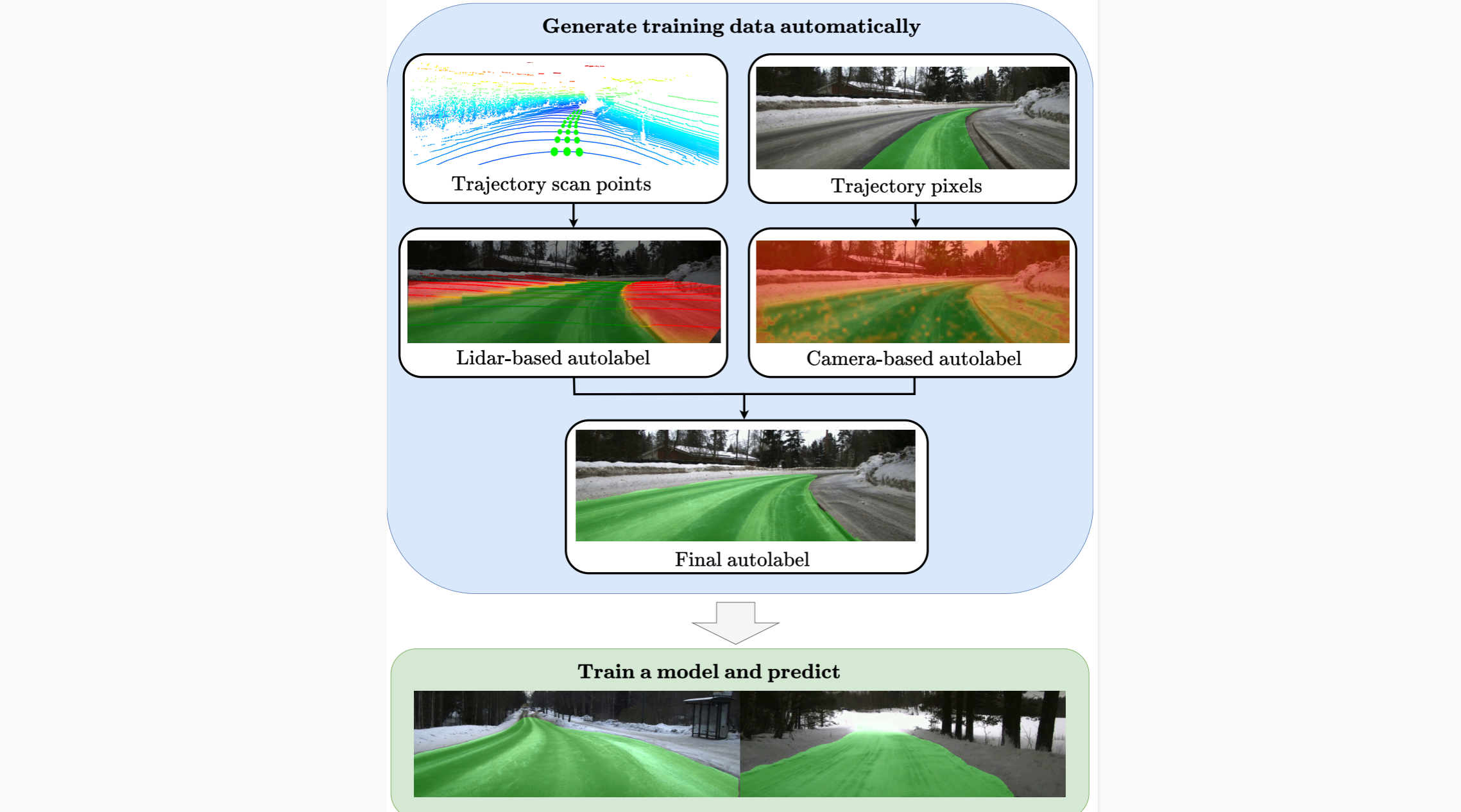
Autonomous Vehicle Operation
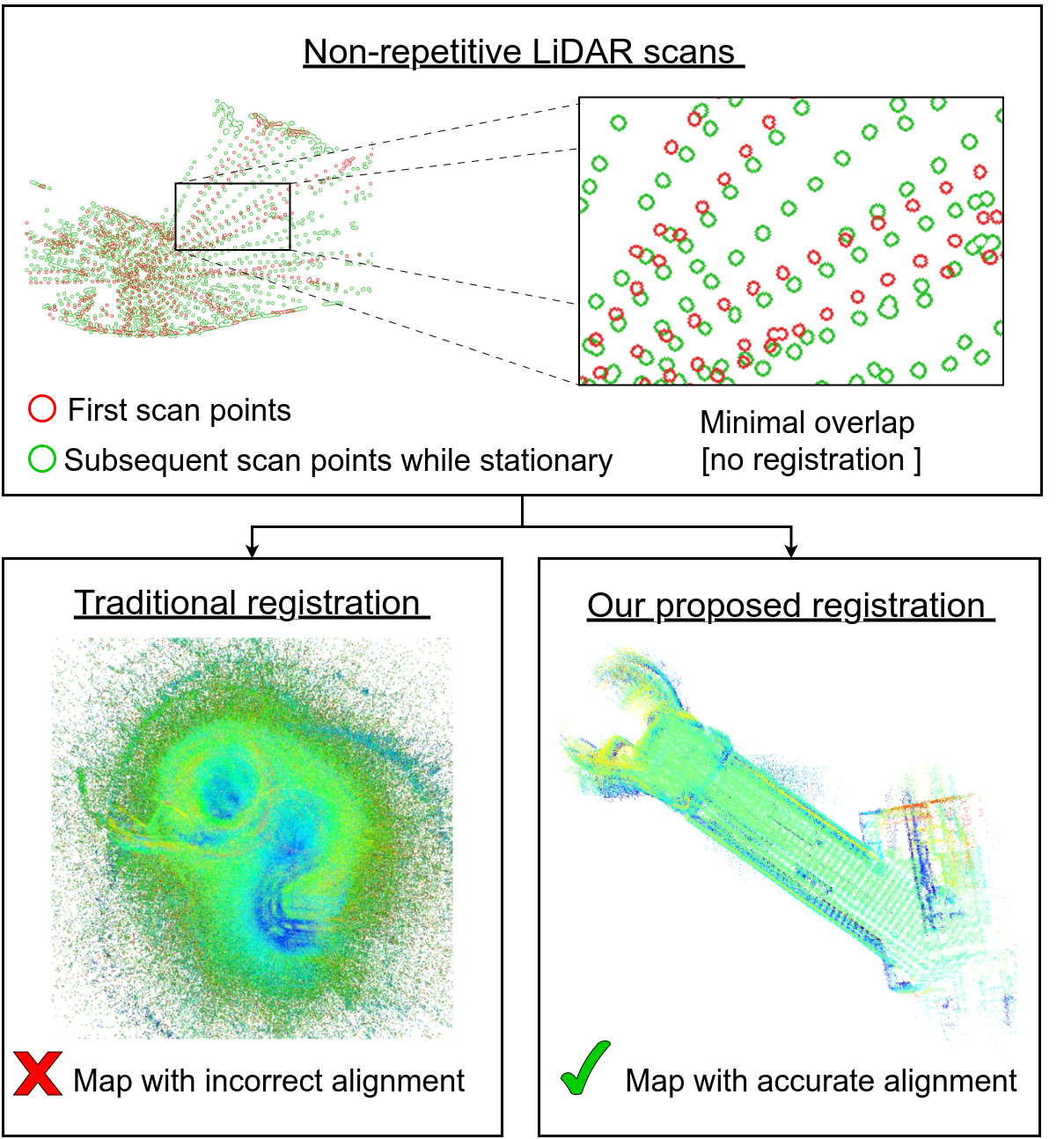
Our lab is at the forefront of automated driving technologies, with a focus on the challenging winter conditions. We develop autonomous vehicles adept at navigating icy, snowy, and unpredictable roads. We employ a differential robot named Dbot, outfitted with a Velodyne VLP-16 and stereo cameras, alongside a TurtleBot equipped with 2D LiDARs, for indoor mapping and localization. Our research also encompasses powertrain optimization, aiming for vehicles that are autonomous, energy-efficient, and eco-friendly. Our facilities include a spacious workshop with four vehicle bays, a dedicated battery cell testing room, a cold chamber, and an electronics lab.

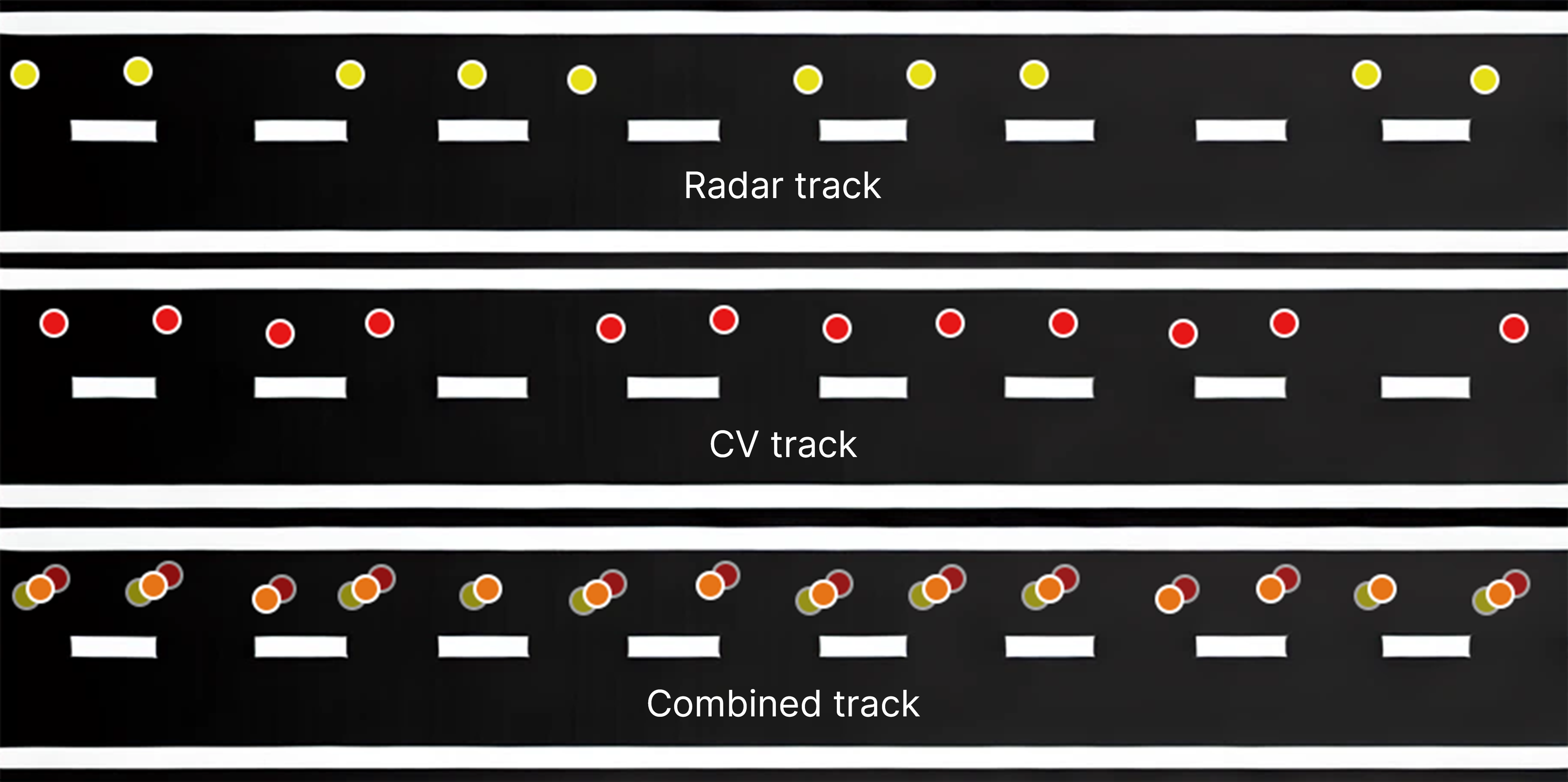
Intelligent Transportation Systems
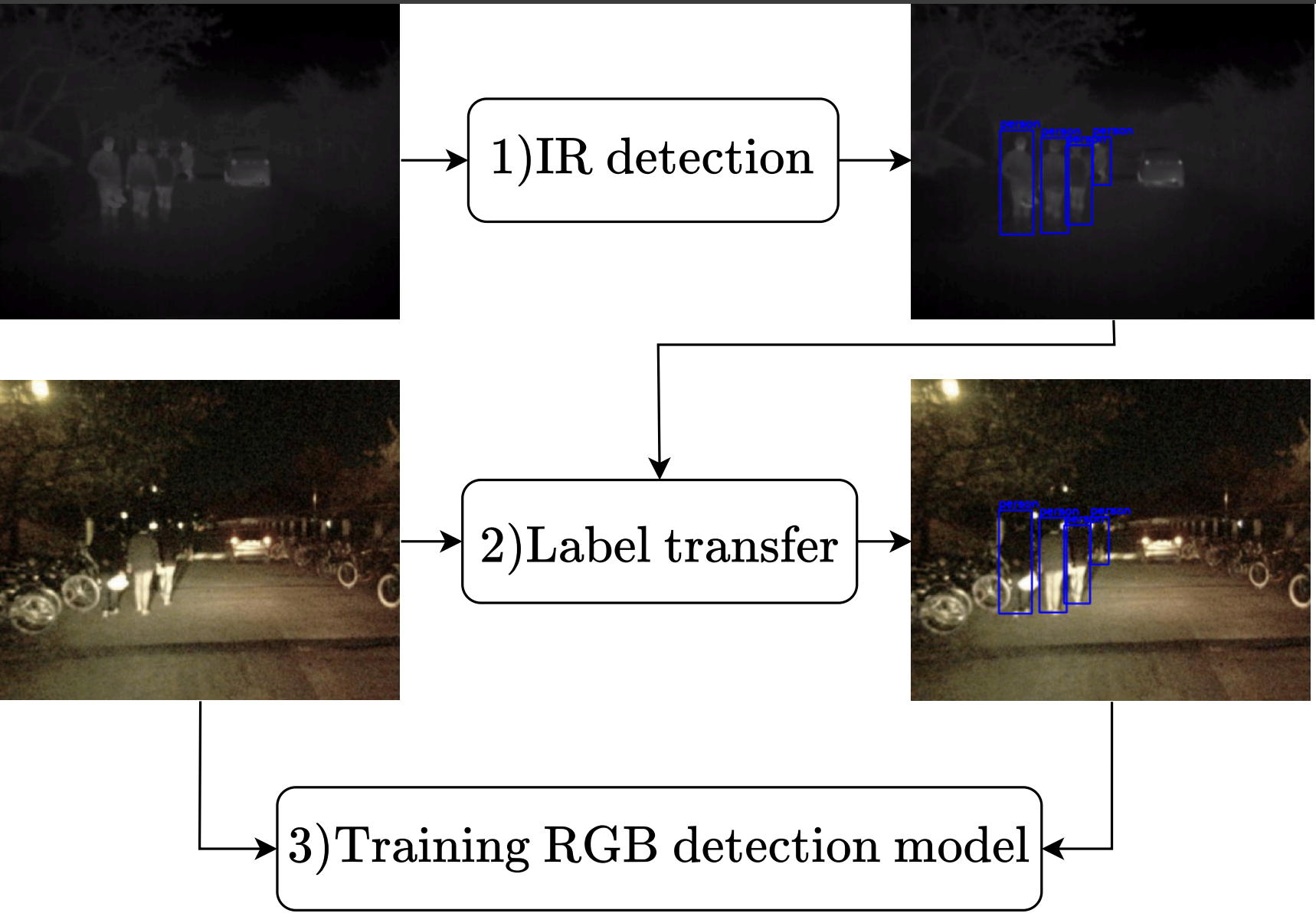
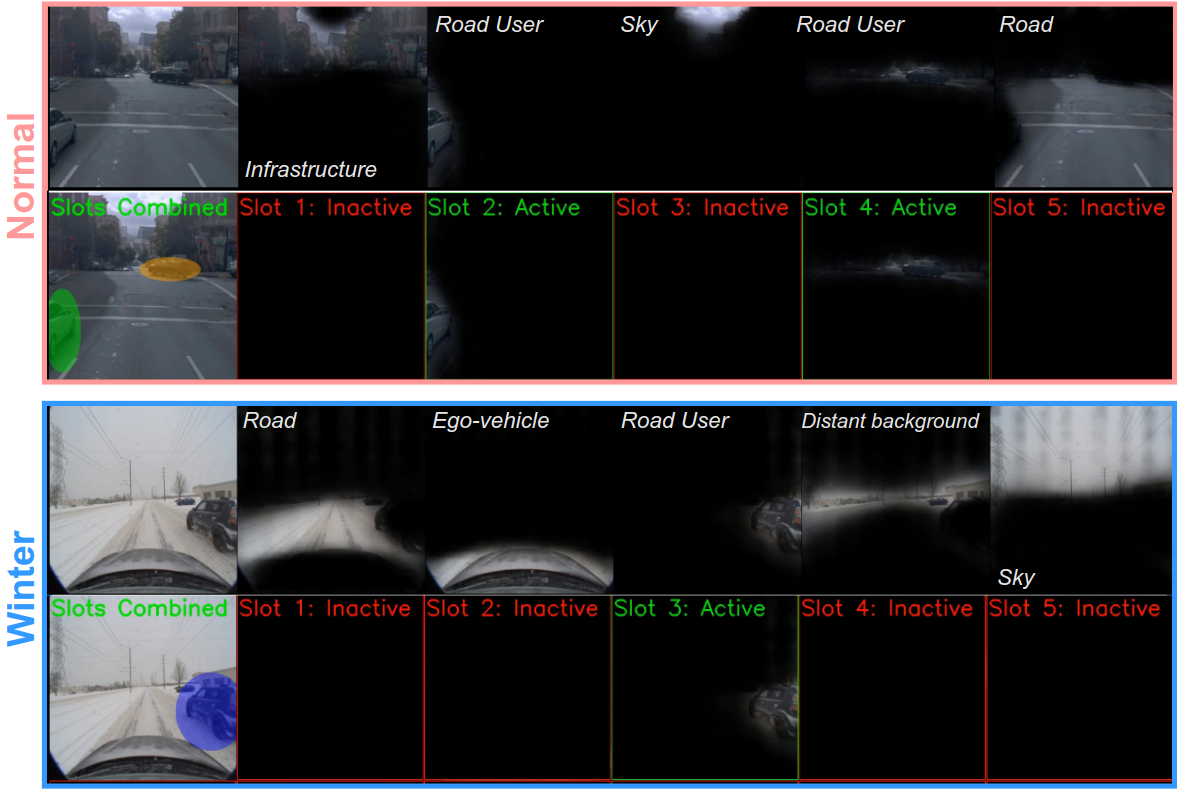
Intelligent transportation systems are pivotal in the shift toward autonomous, safe, and green mobility. Our work focuses on machine vision in vehicles and as part of intelligent infrastructure to enhance the perception of road conditions, braking events, and interior cleanliness. Our systems detect and track road users, providing warnings to drivers about hazards they may not notice.

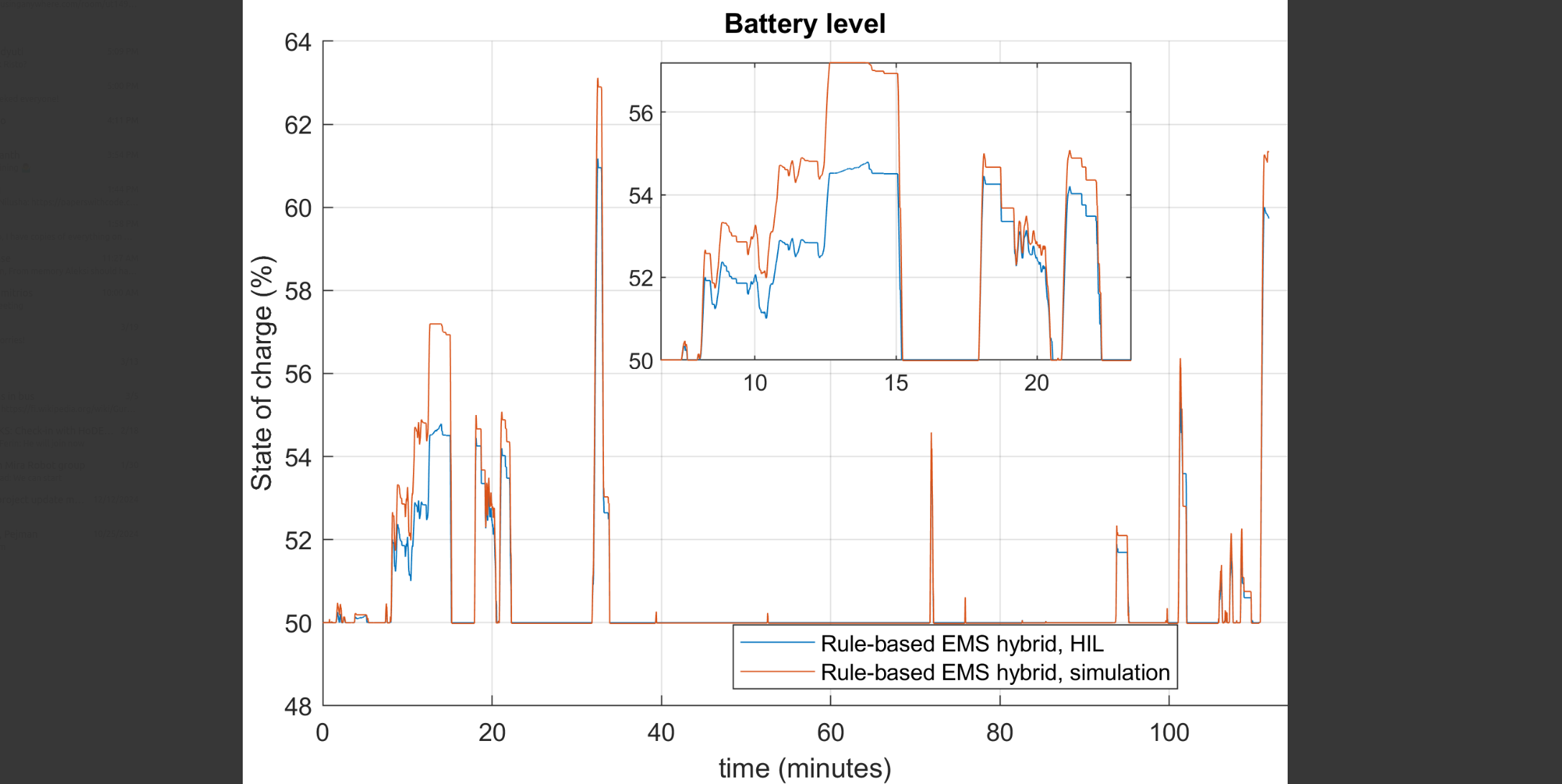
Powertrain and Operation Optimization
Sustainability is key in vehicle design. Vehicle performance hinges on the driver, route, traffic, and weather—all of which influence powertrain configuration. These variables can lead to inefficient driving and the need for oversized powertrain components like batteries. Our research investigates these uncertainties and their effect on energy consumption to refine the design and operation of powertrains.

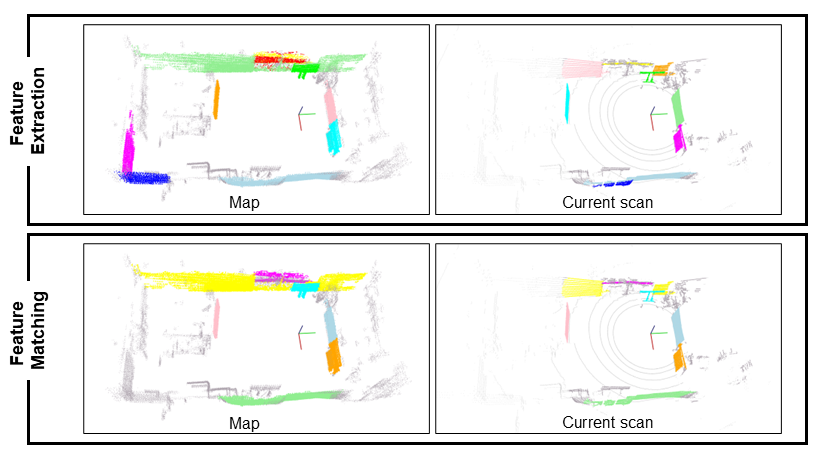
Indoor Mobile Robots
"Indoor robotics have gained significant popularity over the past decade. In response to this growing trend, AMLab has designed and developed a differential wheel robot named Dbot. This robot is primarily used for data collection, software development, and as a testing platform—mainly focusing on SLAM (Simultaneous Localization and Mapping) and localization technologies."



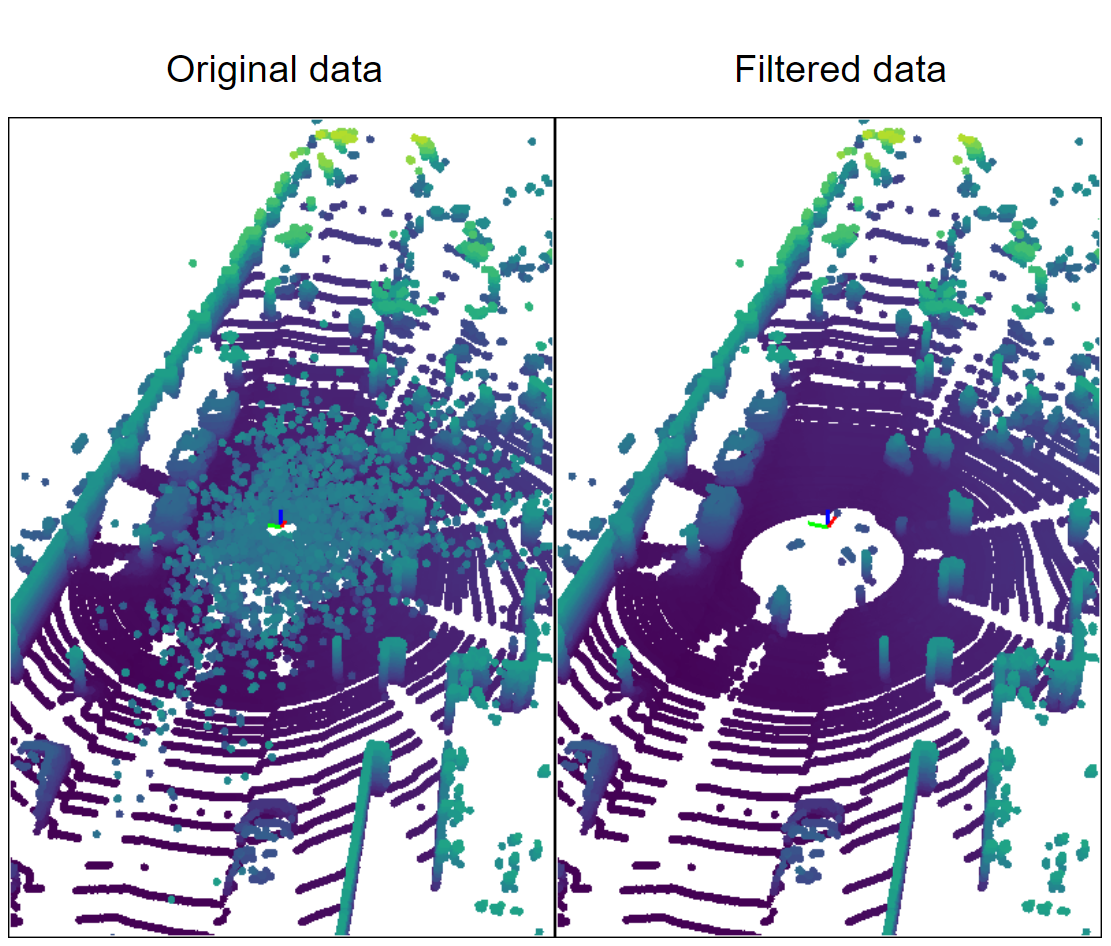

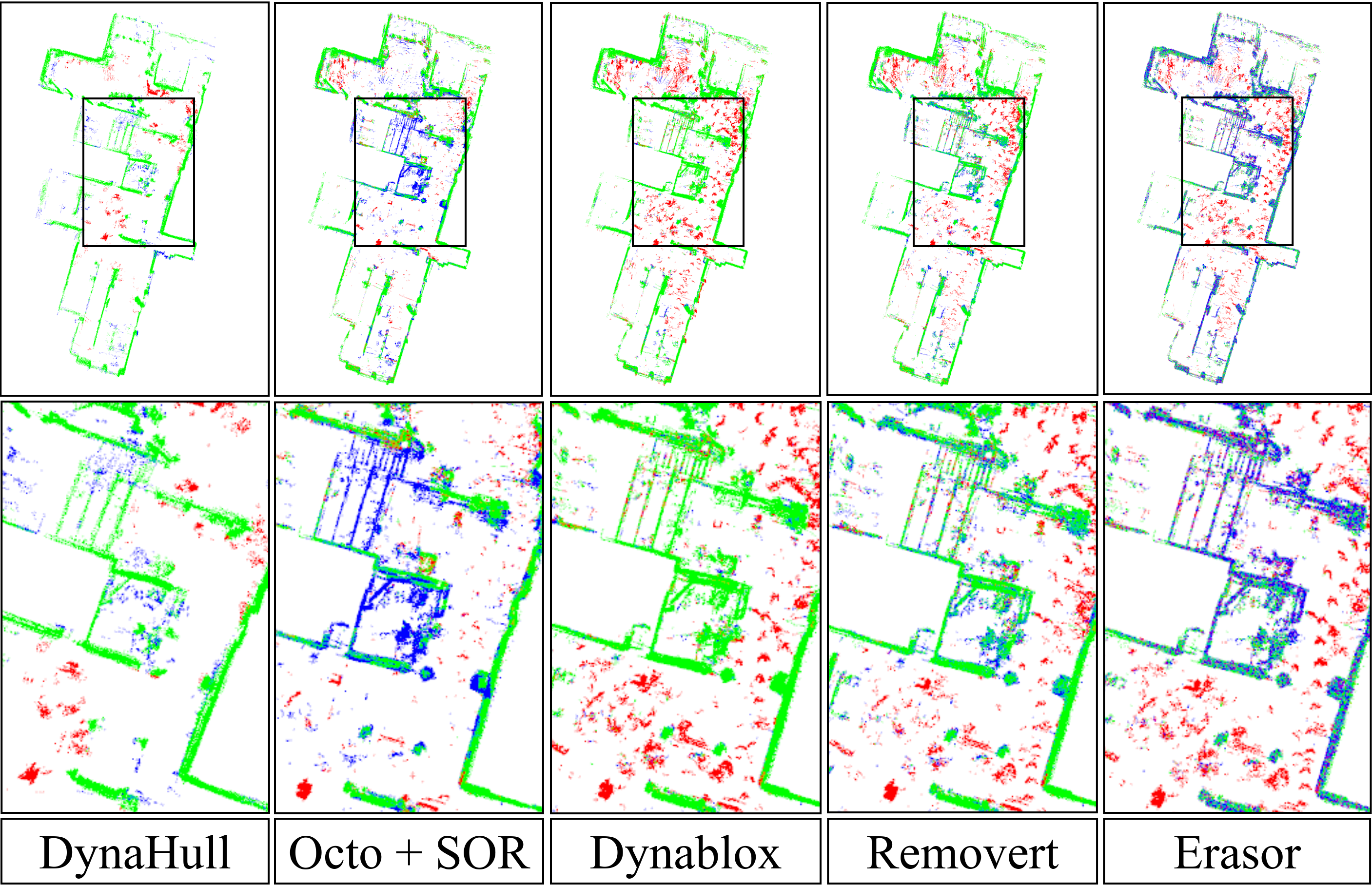


Our research group




