






Research | Robotic Instruments
Research topics of the group.
main / research
Research topics
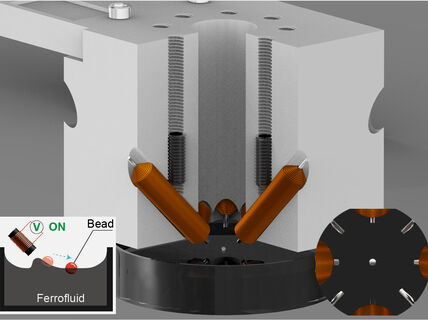
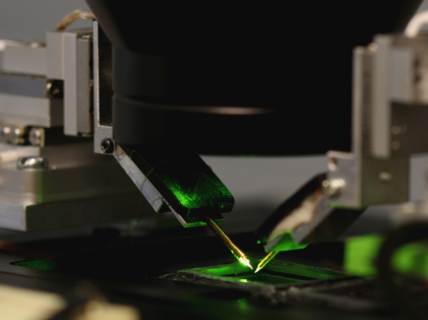
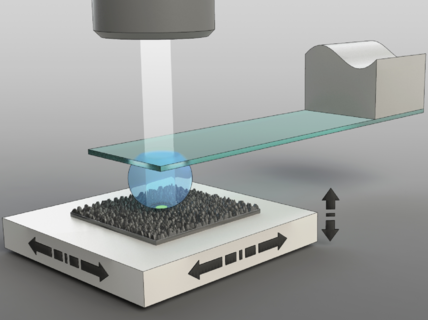
Our research develops physical and system-level robotics through robotic instruments, experimental platforms, and engineered physical interactions. By combining physics, mechatronics, automation, and machine learning, we create new ways for robots to sense, actuate, manipulate, and interact with matter across scales and environments.
The topics below illustrate this approach through contact interactions, acoustic and magnetic fields, interfacial forces, and fluidic flows, spanning micromanipulation platforms, robotic instruments, and field- or interface-mediated robotic systems.







Robotic Instruments