SMARTEDGE - AALTO (EU Horizon Europe 2023-2025) Smart Infrastructure to Vehicle Use Case
(1) Continuous Semantic Integration (CSI)
(2) Dynamic Swarm Network (DSW)
(3) Low-code Edge Intelligence
The SMARTEDGE solution will be comprehensively demonstrated over four application areas: automotive, smart city, factory and health via the strong collaboration of industrial partners like Dell, Siemens, Bosch, IMC, Conveqs, Cefiel and NVIDIA together with esearch institutes including Aalto University, Technische Universität Berlin (TUB) and others. Aalto University will mostly contribute to the use cases related to traffic management.

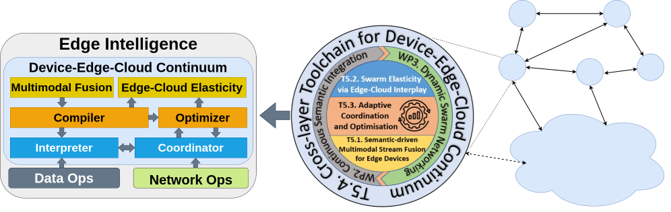
The SMARTEDGE-project consists of several building blocks (figure 2):
- Continuous Semantic Integration (CSI) allows the SMARTEDGE solution to interact with devices according to a (i) standardized semantic interface, via a (ii) continuous conversion process based on declarative mappings and scalable from edge to cloud, and (iii) providing a declarative approach for the creation and orchestration of apps based on swarm intelligence.
- Dynamic Swarm Networking (DSW) provides (i) automatic discovery and dynamic network swarm formation in near real time, (ii) hardwareaccelerated in-network operations for context-aware swarm networking, and (iii) embedded network security. The low-code tool chain provides (i) semantic-driven multimodal stream fusion for Edge devices; (ii) swarm elasticity via Edge-Cloud Interplay; (iii) adaptive coordination and optimization; (iv) cross-layer toolchain for Device-Edge-Cloud Continuum.
- Low-code Edge Intelligence provides an environment to implement functional AI/ML-solutions with very limited amount of programming code by using building blocks developed within the SMARTEDGE-project.
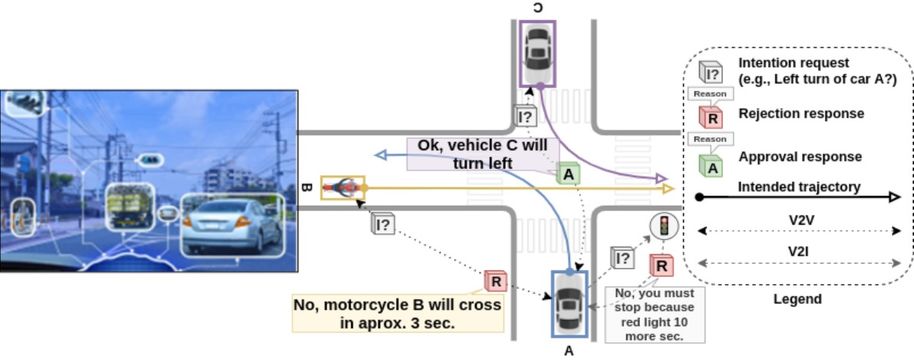
The use case 1 is related to Cooperative ADAS (Advanced Driving Assistance System). This demonstration is supporting cooperative perception building of the road users. The ego-vehicle indicates its intentions to other through the V2X-technology. Similarly, the other road users indicate their response (accept/reject/postpone). Fox example (figure 3), Car A communicates to others its intention of turning to the left. A motorcycle B rejects the intention because it has right of way. Car C approves it because its own intention is to turn to the left, so there is no conflict between the trajectories. If the traffic signals are on, then they can also provide their response to the vehicles. The role of Aalto University research is related to specification of the requirements for the use case 1, simulation of various scenarios of the cooperative ADAS and providing support for the field demonstration in the Mobility Lab Helsinki.
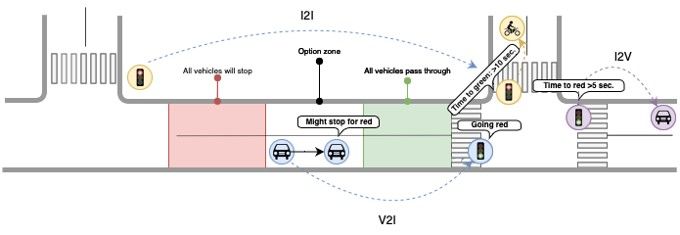
The use case 2 is related to active management of the option-zone in traffic signal control (figure 4). The option zone is the area, where rear-end collision risk is high, if there is more than one vehicle at the moment of green end. Traditional clearing of the option zone is based on detector or other sensors, but the only option for the controller is to wait passively until the conditions for green termination are safe. This can lead to suboptimal signal timing and reduced efficiency of the traffic flows. In active option-zone management, the sensor data from previous intersection is sent to the next one allowing an early detection of hazardous conditions (I2I, Infra-to-Infra). If it seems that by the green end there is going to be two vehicles at the option-zone, then the controller can deliver an early signal to the latter vehicle to slow down and to increase the gap to the vehicle ahead (I2V, Infra-to-Vehicle). This way the green signal can be terminated safely at the optimal moment. The role of Aalto University research is related to specification of the requirements for the use case 2, analysis of the sensor data and modeling of the traffic situation. Simulations of various scenarios will be done as well as supporting the field demonstration at the Mobility Lab Helsinki.