






Smart Junction
The Smart Junction project is carried out in co-operation between Aalto University, City of Helsinki, Port of Helsinki and Conveqs Oy. Several other companies are involved in the project, too. City of Helsinki is providing the test area called Jätkäsaari Mobility Lab. Aalto University is carrying out reseach by using the new sensor data. Conveqs Oy is developing the open data platform.

The Smart Junction project is carried out in co-operation between Aalto University, City of Helsinki, Port of Helsinki and Conveqs Oy. Several other companies are involved in the project, too. City of Helsinki is providing a living lab area called Mobility Lab Helsinki for development and piloting of new services for traffic and mobility. Aalto University is carrying out reseach by using the new sensor data. Conveqs Oy is developing the open data platform.
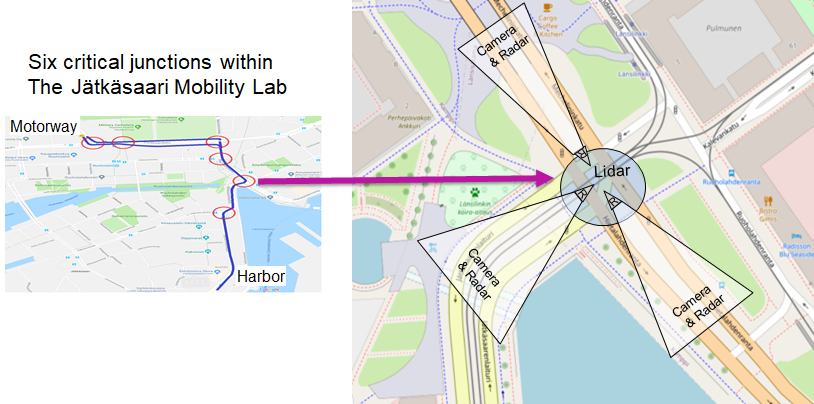
New type of traffic sensors are being installed to the six critical junctions from the harbour to the Länsiväylä motorway (figures 3-4). Each junction is equipped with multiple sensor stations consisting of camera, radar and edge computing unit. Each sensor station is pointing upstream of one approach of the junction. Laser scanning is also applied in one intersection for detecting pedestrian and bicycles as well as vehicles in the intersection area.
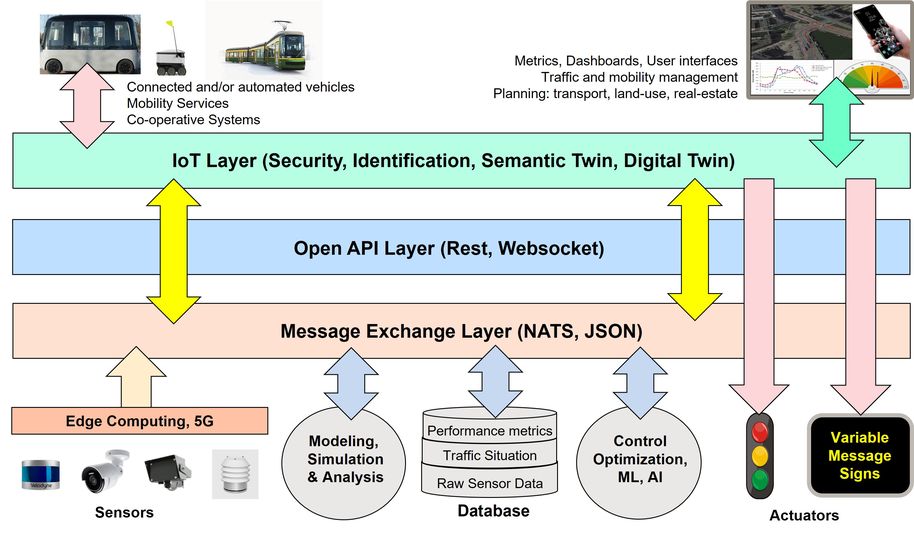
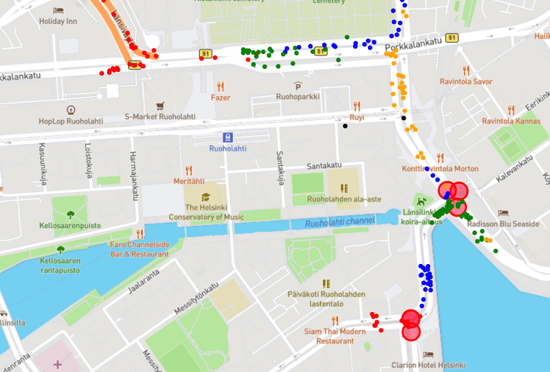
The raw data from the sensor stations is collected by an open data platform (figure 2.) that connects the data to an open interface (API). Data is also collected from the signal controllers (state of traffic signals and/or detectors) and from the public transport API (real-time positioning of trams and other public transport). A visualization of the real-time radar data is in figure 3.
One of the basic ideas of the Smart Junction project is combine all the data sources to formulate a one consistent 'picture' of the present traffic situation (figure 4. a real-time digital twin).This machine readable picture is reflecting the actual traffic situation in high spatial and temporal accuracy and with very low latency. The digital twin is also used to fill in the gaps between various sensors and to reduce the noise of the sensor data.

Both the raw data and the refined data can be shared through an API:s or a web-based dashboard. The dashboard provides and integrated view to the refined data in form of real-time animation of the traffic situation and time series of the performance metrics. The dashboard provides also environment for examination of different scenarios with real traffic demand. The same performance metrics is received as output as from the real-time digital twin.

Services can be built on top of the digital twin so that they do not have know about the sensor types, locations, ranges and configurations. The services accessing the digital twin may involve traffic information and routing services, traffic signal control, variable message signs and C-ITS.
Multitude of performance metrics (MoE) can be computed from the digital twin including aspects of traffic performance (travel times, delays, queues, stops), traffic safety (option zone, red driving, near accidents) environmental impact (emissions, noise, air quality) and economy (fuel consumption, time savings). The metrics data can be collected over a lane, cross-section, approach, route or area regardless of the sensor configurations.
Sensors and installations
Several types of new sensors are installed into the Smart Junction test area within the Jätkäsaari Mobility Lab of Helsinki. The area to be covered consists of six consecutive intersections that are the main connection between the harbour and the motorway (figure 6.).
A sensor station consist of edge computing unit and the sensors like camera and radar. Each unit is installed to point from the intersection towards the approaching vehicles. Within one the intersection area an additional lidar unit is used mainly for tracking pedestrians and bicycles.
Additional data is obtained from the signal controllers, namely the status of traffic signals and detectors. The position of public transport like trams is received in real-time through and open data API.
Live video stream is obtained from the area through several cameras (figure 7). The camera data provides a ground truth against which the other sensor data can be verified. From the video stream the vehicle types can be recognized better than from radar for example, but speed and position data is less accurate. Lighting conditions may also have an effect.

Radar data is used to obtain accurate speed and position of the vehicles (figure 8). Radar is less prone to weather and lighting conditions than a camera. Radar is not so good in detecting slow moving and small object like pedestrians and bicycles.
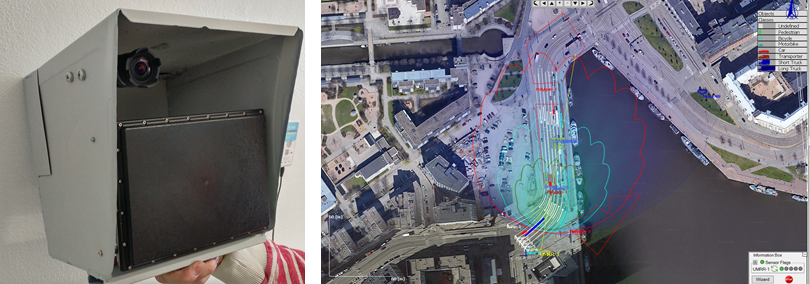
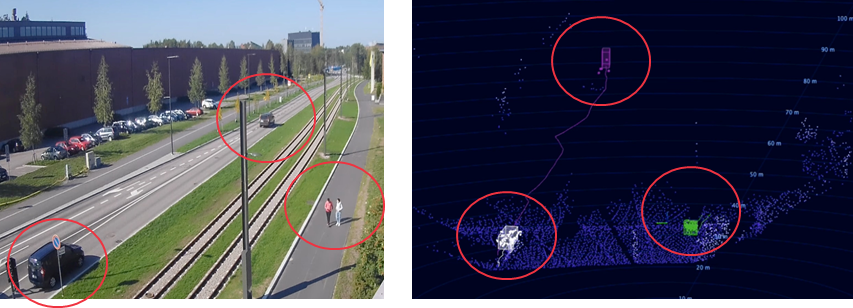
Laser scanning (lidar) is a potential new method for collecting real-time traffic data (figure 8). The range is somewhat smaller than than that of radar, but lidar can be used to detect the vehicle/road user type, too. In the Smart Junction project lidar is used to detect the traffic within the intersection area including the pedestrian and bicycle traffic.
All the real-time traffic data is collected by using an open data platform of Conveqs Oy. The platform collect the data from the sensors several time per second and process it in a server. The sensor data is provided to other users through an open API.
In cooperation with:
-
Aalto University
-
School of Engineering
-
Spatial Planning and Transportation Engineering
-
Department of Mechanical Engineering
-
-
School of Electrical Engineering
-
Department of Communications and Networking
-
-
-
City of Helsinki, Urban Environment Division (KYMP)
-
Port of Helsinki
-
Mobility Lab Helsinki
-
Forum Virium, Helsinki
-
Technische Universität Berlin
-
Fraunhofer-Gesellschaft
-
KTH Royal Institute of Technology
-
University of Helsinki
-
Taltech
-
National Inter-University Consortium for Telecommunications (CNIT)
-
Cefriel, Politecnico di Milano
-
University of Fribourg
-
Haute Ecole Spécialisée de Suisse Occidentale
-
Conveqs Oy
-
Nodeon Oy
-
Bluecity.ai
-
Solita Oy
-
Asema Electronics
-
InfoTripla Oy
-
Digisys Oy
-
Siemens AG
-
Bosch GMBH
-
Mellanox / NVIDIA
-
IMC- Industrial Management Consulting